| |
Econo EtherCAT Nerwork Solution
|
|
Comprehensive Control Solutions for Machinery with Demanding Multi-Axis Motion
- Semiconductor - Electronic Assembly - Digital Printing - Solar Panel - Flat Panel Display - Sub-micron Accuracy Systems - Biomedical Inspection and Scanning
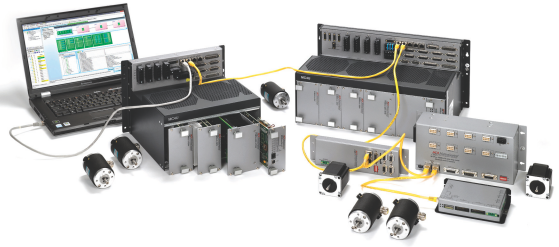
Standalone EtherCAT® Master & Motion Controller
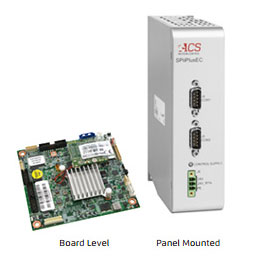 |
SPiiPlusEC
Most Powerful Motion Controller and EtherCAT Network Manager

|
.jpg) |
SPiiPlusES
High Performance Multi-Axis EtherCAT® Controller & DS402 Multi-Axis EtherCAT® Drive Node
|
|
EtherCAT® Motion Controller with Built-In Drives
|
SPiiPlusCMnt
with 1, 2 drives, 85-265V, up to 7.5/15A
|
|
SPiiPlusCMhp/ba
with 1 to 3 drives, 85-265V, up to 15/30A
|
|
|
SPiiPlusCMhv
with 1 or 2 drives, 230-480Vac, up to 15/30A or 230Vac 20/60A
|
 |
MC4Unt
with 2 to 8 drives, wide power range
|
|
NanoPWM™ EtherCAT® Motion Controller with Built-In Drives
|
MC4Unt
with 2 to 8 drives, wide power range
|
|
Drives with Outstanding Move & Settle, Nanometer Jitter, Smooth Velocity
|
UDMlc
2, 4 drives, 12-48V, up to 5/10A
|
|
UDMsd
2,4 drives, 12-48V, up to 2.5/5A
|
|
|
UDMpc
1, 2 drives, 24-48V, up to 10/20A
|
|
UDMnt
1, 2 drives, 12-80V, up to 10/20A
|
|
|
UDMmc
2, 4 Axis Drive Module, 80V, up to 20/40A
|
|
UDMcb
1, 2 drives 12-60Vdc or 12-100Vdc, up to 13.3/40A
|
|
|
UDMpa
1,2 drives, 12-60Vdc or 12-100Vdc, up to 13.3/40A
|
|
SDMnt
4, 8 unipolar stepper motor drives, 40V, 3A
|
|
|
UDMpm
1, 2 drives, 85-265V, up to 7.5/15A
|
 |
UDMhp/ba
1 to 3 drives, 85-265Vac, up to 15/30A
|
|
|
UDMhv
1 or 2 drives, 230-480Vac, up to 15/30A or 230Vac 20/60A
|
|
MC4Udc
2 to 8 drives, wide power range
|
|
 |
MP4U
8-Axis Modular EtherCAT Drive Module
|
|
|
|
EtherCAT Interfaces to Motor Drives with 10V Input, Laser Control Module
|
LCM
Laser Control Module
|
|
PDMnt
4 Axis Pulse/Direction Drive Interface
|
|
|
PDIcl
2, 4 Axis Pulse Direction Drive Interface Module with Feedback
|
|
UDIhp/lt
2 to 4 axis +/-10V drive interface
|
|
Digital & Analog I/O Modules
|
IOMnt
EtherCAT Digital I/O Module
|
|
IOMps
EtherCAT I/O Modules
|
|
NanoPWM™ EtherCAT Drive Modules with Unprecedented Move & Settle, Nanometer Jitter, Smooth Velocity.
|
NPMpc
1,2 drives, 12-100v, up to 13.3/40A
|
|
NPMpm
1,2 drives, 12-100V, up to 13.3/40A
|
|
 |
MP4U
8-Axis Modular EtherCAT Drive Module
|
|
|
|
Panel-mounted, integrated Control Modules
High Performance Multi-Axis Motion Controllers with Integrated Digital Drives |
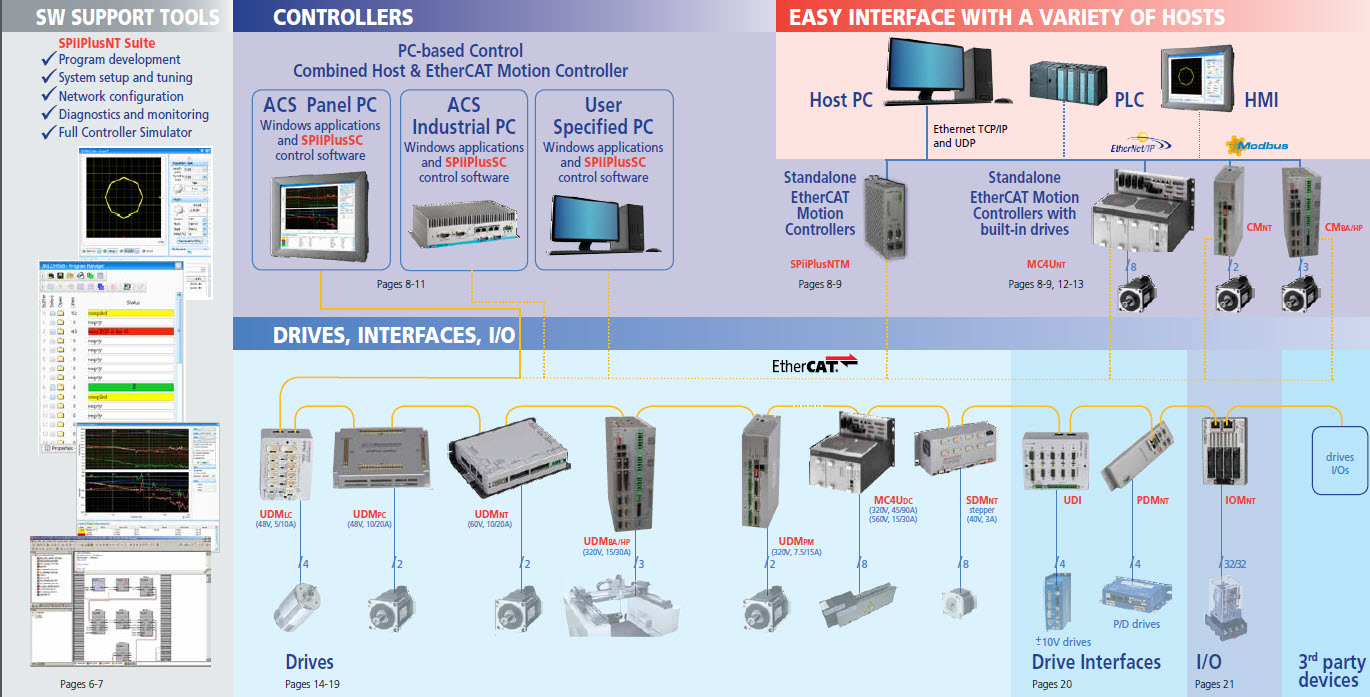
PC-based Controllers
Advanced, High Performance Multi-Axis Motion Controller for Demanding Applications. |
SPiiPlus Series
Advanced, High Performance Multi-Axis Motion Control Products. |
|
|

Special(Low Cost Module)
-SPiiPlus LCM-1-A
-SPiiPlus LCM-1-B
-SPiiPlus LCM-1-C
-SPiiPlus LCM-1-C
-SPiiPlus LCM-1-C
|
|
|
|
|
|
__________ระบบควบคุมการเคลื่อนที่ (High Performance Multi-Axis Motion Controllers)
E = มี Ethernet ( port สื่อสาร ) , มี serial port 2 port , CAN BUS , HSSI 4 Ports,MODBUS
H4 = มี Servo processer 4 ตัว ( HSSI port 4 port) ; Servo processer 4ตัวสามารถควบคุม Servo control loop ได้ 8 loop , คือ 8 แกน , ทั้งหมด 8 axes
_____หมายเหตุ Servo Processer 1 ตัวสามารถควบคุมได้ 2แกน Power supply voltage for the digital drives สามารถใช้ได้ตั้งแต่ 85Vac ถึง 265Vacมาพร้อมกับ Software มาตรฐานและ Virtual instrument และ Oscilloscope บน Software ,ACSPL , COM DLL สำหรับ WINDOW ,Application Code และ Software สำหรับ C ,C++ ,VISUAL BASIC ,VB SCRIPT (HTML MOTION CONTROL),COM LIBRARY สำหรับ Application Software ต่างๆที่ RUNบน WINDOW ,LABVIEW , MATLAB , SDK
_____รายละเอียดทั่วไป
_____A. สามารถให้ความรู้ และประยุกต์ใช้ได้ทุกระบบของงาน แมคคาทรอนิกส์และระบบควบคุมอัตโนมัติและเป็นระบบ MOTOR CONTROL ที่ ADVANCEที่สุด และเป็นอันดับหนึ่ง ณ. ปัจจุบัน
นี้ซึ่งสามารถขับมอเตอร์และเซอร์โวมอเตอร์ได้ตั้งแต่ 10 W จนถึง 1800 W
_____B. สามารถต่อขยายแกน (AXES) ได้สูงสุดถึง 8 แกน ได้ในอนาคต โดยเพิ่มแค่ DRIVE และMOTOR และ TERMINAL BOX เท่านั้น
_____C. มีระบบ AUTO COMMUTATION ที่ ADVANCE มาก และสามารถพิมพ์ขบวนการ COMMUTATION ออกมาดูได้เพื่อการศึกษา , โดยระบบสามารถควบคุมมอเตอร์ได้ทุกประเภทเพื่อให้เป็นระบบ SERVO แบบ CLOSE LOOPเช่น AC SERVO , DC BRUSH , DC BRUSHLESS, STEP MOTOR , INDUCTION MOTOR , SYNCHRONOUS MOTOR , ASYNCHRONOUSMOTOR , UNIVERSAL MOTOR , LINER MOTOR ฯลฯ
_____D. มี ADVANCE FUNCTION พิเศษ เช่น- มี OSCILLOSCOPE 4 CHANNEL (4 สี) แบบ REAL TIME เปิดดูได้หลายหน้าต่าง (WINDOW) พร้อมกันได้ในเวลาเดียวกัน
- SIGNAL PROCESSING , ARITH METIC ,TRIGONOMETRIC,STATISTIC, ฯลฯ
- REAL TIME DATA COLLECTION , PEG (POSITION EVEN GENERATOR)ได้ทุกตัวแปร , PRE-IGNITION , HARDWARE POSITION REGISTRATION MARK.
- CONNECT FUNCTION และ INVERSE KINEMATIC ที่ ADVANCEสำหรับงาน ROBOT,XYZO GANTRY , ฯลฯ
- COMPENSATE FUNCTION - DYNAMIC ERROR MAPPING,MECHANICAL COMPENSATE , COORDINATE TRANSFORMATION, TOOL OFFSET COGGING COMPENSATE, POSITION MAPPING , NOTCH FILTER ฯลฯ
- FFT (FAST FOURIER TRANSFER), TRANSFER FUNCTION (UPGRADE FIRMWARE ได้ต้นปี 2005)
_____E. เป็นระบบ REAL TIME มีสถาปัตยกรรม (ARCHITECTURE) แบบ MULTI- PROCESSOR มี CPU หลายตัว โดย MAIN CPU เป็น PENTIUM 32 BT และ SLAVED PROCESSOR (Spii)แบบ DSP (RISC-CP) อีก 4 CPU ที่ UPDATE-RATE50 uSEC ณ. ที่ความเร็วในกาคำนวณที่ SLAVED CPU นี้มีการคำนวณ ที่เร็วแบบ DOUBLE PRECISION (64 BIT) FLOATING POINT TRAJECTORY.
_____F. สำหรับอนาคต สามารถเพิ่ม OPTION CARD เพื่อ
- ขยายแกน (AXES) ได้ถึง 8 แกน โดยทำงานแบบ INTERPOLATE และ มี FUNCTION ด้วยกันทั้ง 8 แกน เพียงแค่เพิ่ม TERMINAL BOX , MOTOR , DRIVE
- รับ SIN-COS ENCODER สำหรับงาน TORQUE MOTOR , NANO- MOTION CONTROL , INTERROLATE สัญญาณ FEED BACK ฯลฯ
- เพิ่ม I/O , ANALOG INPUT & OUTPUT ได้มาก , SENSOR แบบ SERIAL/PARALLEL
- UPGRADE FIRMWARE สำหรับ FUNCTION พิเศษ เพิ่มเติมจากการพัฒนาจากโรงงานผู้ผลิตได้จาก WEBSITE
_____G. มี SIMULATOR เพื่อการทดลอง (โดยไม่ต้องใช้ HARDWARE) และ การศึกษา ,พัฒนาโดยดูผลจากตัวแปรทุกตัว หรือ USER VARIABLE ได้ที่ OSCILLOSCOPE แล้ว นำมาIMPLEMENT กับ HARDWARE จริงได้ภายหลัง ; มี MULTI DEBUGGER ดูการ EXECUTE ของโปรแกรมได้พร้อมกันถึง 10 โปรแกรม
_____H. ที่อุปกรณ์แต่ละตัวที่นำมาประกอบเป็นระบบจะสามารถดู SPEC เพิ่มเติมได้จาก WEBSITE และยังรับการ SUPPORT จากโรงงาน ผู้ผลิตโดยตรงผ่านทางบริษัทฯได้
|
|
|